


体幹下部の筋配列に思う
こんにちは!ハリ弟子です。
数年前に熊本水賴(みなより)先生の拮抗二関節筋による出力方向制御モデルに触れて以来、体幹のバランス制御にこれを活かせるのかどうか考えてきました。
熊本先生のモデルは腕と脚に関してのみ適用されていて、単関節筋と二関節筋を組み合わせた3対6筋の筋配列があって、肘または膝の関節が1軸性であって、筋肉や筋膜に一定のテンションがあれば、神経系の制御がなくても動物は立つことができるというものでした。
証明はとっても難しくてよく分かりませんが、こちらのサイトに詳しく書かれています。
熊本先生は工学畑の人でもあり、原発事故で現場に送り込まれたロボットがのきなみ放射線で制御コンピューター破壊されて使いものにならなかったことを受けて、素材と構造それ自体で動ける仕組みを生体から学ぶことを考えてらっしゃいました。
それはともかく、体幹の場合はどう考えればよいでしょうか?
背骨の椎骨は関節だらけでとても腕や脚のようにはいきません。
無理があるのを承知で骨盤と腰椎について思考をめぐらしてみました。
なぜ腰椎かというと、可動性という意味で腰椎だけが(ほぼ)前後屈のみで1軸性と見なせなくもないこと、骨盤をはさんで大腿骨と筋肉でつながっていること、これにより拮抗二関節筋による出力方向制御モデルとの相違を論じやすいからです。
まず整理のためにここでは骨盤と腰椎を結ぶ筋肉を単関節筋、大腿骨と腰椎を結ぶ筋肉を二関節筋とみなすことにします。
そうするとこのエリアでの背側は単関節筋のみ、腹側は多くの人で二関節筋のみであることが分かります。
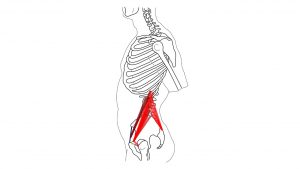
背側では、腰方形筋や多裂筋の一部が骨盤から腰椎を結びますが、大腿骨から骨盤を越えて腰椎につく筋肉はないので単関節筋のみ。
腹側では、大腰筋が腰椎から出て大腿骨につき、小腰筋は腰椎から骨盤につきますが小腰筋は欠損していることが多く約半数の人にはありません。
なので人により二関節筋しかなかったり単関節筋もあることになります。
熊本先生のモデルは屈曲側伸展側両方に、単関節筋と二関節筋ともに備えている必要があるので、この時点でこのモデルは当てはまりません。
では他のモデルで何かあるのかというと現時点では分かっていません。
やはり何らかの制御が必要、または構造と筋配列だけで重力とのバランスが取れるとしても重力との関係性(骨盤の角度とか腰椎の状態とか)がある一定の状態である場合に限られるのではないかという気がします。
そう考えると腰に問題を抱えるケースでとても多いのが腰椎前弯がとてもきついか、または真逆の後弯であることが少し違う角度で見えてきます。
前弯がきついケースは、腰椎を椎間関節が当たる限界まで後屈させることで固定しています。
後弯のケースでは、腰椎背側の靭帯などが伸び切る限界まで前屈させることでやはり固定して腰椎をユニットとして扱っています。
やってることは真逆ですが、いずれも制御の要素を少なくして動きを単純化している、つまり脳の方が楽できるような体の使い方をしているように見えます。
しかし長年にわたりこれをすることが筋骨格系への負担が大きいことは言うまでもありません。
してみると重力とのバランスが取れるような骨盤と腰椎の関係性があるとして、それを実現できる動きの幅は両極端の間のエリアにあって、そこにいながら腕や脚を自由に使えるような全身の協調的動きというのは意外と高度な制御技術かも知れないなあと思うわけです。
アレクサンダー・テクニークをやるというのは、この狭い幅と体の他の部分の動きを矛盾なく成立させるのに確実に役に立っていて、だから世界的に腰痛に効くメソードだと思われているんでしょうね。
なかなか証明は難しいんですが、ところどころ無理に理屈をつないでいるのも分かってるんですが、そんなことをふと考えてみた年末です。
2016年、東京都練馬区の江古田にて音楽家専門の鍼灸治療院を始める。
2021年、東京都品川区の鍼灸院「はりきゅうルーム カポス」に移籍。音楽家専門の鍼灸を開拓し続ける。
はり師|きゅう師|アレクサンダー・テクニーク教師
