


筋肉の協調制御モデル
こんにちは!ハリ弟子です。
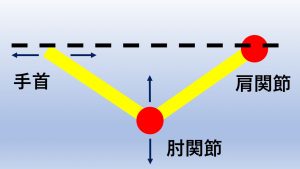
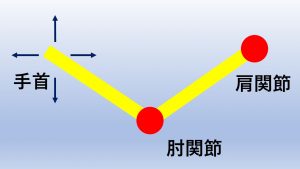
昨日は手首が最短距離で肩関節に近づく時、使われる筋肉は肘の屈曲単関節筋である上腕筋だけが作用する話でした。
これを発見したのは熊本水頼(くまもと みなより)京都大学名誉教授でした。
東京オリンピックのカヌー選手の腕の筋電図を測定した時のこの発見から、熊本先生は手首が動く方向すべてについて筋肉がどのように働くのか研究しました。
その結果、手首の動く方向性はすべて三角筋前部/三角筋後部、上腕筋/上腕三頭筋外側頭、上腕二頭筋長頭/上腕三頭筋長頭の三対六筋の活動バランスで説明がつくことが分かりました。
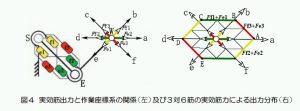
生体機構制御研究会(http://air-dawn.net/)のページより
上の図は熊本先生が委員を務める生体機構制御研究会のサイトよりお借りしたものですが、a~b間とd~e間は上腕二頭筋長頭/上腕三頭筋長頭、b~c間とe~f間は三角筋前部/三角筋後部、c~d間とf~a間は上腕筋/上腕三頭筋外側頭の活動バランスによって方向性が決まることを示しています。
また、脚についても同じメカニズムが働いていて、大殿筋/腸骨筋、大腿二頭筋短頭/外側広筋・内側広筋、半膜様筋・大腿二頭筋長頭/大腿直筋という三対六筋の組み合わせで考えると足首の動きの方向性はすべて説明がつくと言います。
脚の三対六筋の組み合わせは人間が立つ動作において重要で、股関節から上の重心がどこにあるかで足首を動かすべき方向性が決まり、そうなるような三対六筋の活動バランスが自動的に実現して人間は立てるそうです。
この点についてゴムを使った簡単な模型による実験動画(>>第1回 二関節筋とは)があります。
模型による実験は7:10あたりからです。
人間の筋配列をゴムに置き換えて作った模型ですが、滑らずにとどまって屈伸できているのが印象的です。
熊本先生はこのようなことが自動的に起こる構造、つまり三対六筋の組み合わせを獲得したことで、生物は陸に上がることができたのではないかと考えています。
より詳しくは生体機構制御研究会のサイト(>>こちら)に説明が載せられています。
ただし実際に人体で測定すると、このようにきれいに三対六筋の活動バランスが現れるのはフルパワーで腕や脚を動かした時だそうです。
昨日ご紹介したツインレバーステアリングでもドライバーの筋活動を実測していますが、結果は上腕筋だけでなくすべての筋肉がまんべんなく少しずつ活動していたそうです。
とはいえ動きを考える時に三対六筋の視点はとても参考になります。
次回に続きます。
2016年、東京都練馬区の江古田にて音楽家専門の鍼灸治療院を始める。
2021年、東京都品川区の鍼灸院「はりきゅうルーム カポス」に移籍。音楽家専門の鍼灸を開拓し続ける。
はり師|きゅう師|アレクサンダー・テクニーク教師
