


テンション維持機構としての筋骨格モデル
こんにちは!ハリ弟子です。
昨日ご紹介した実験動画(>>第1回 二関節筋とは)では簡単な模型で単関節筋だけの時と二関節筋も含めた三対六筋の組み合わせがそろった時を比較しています。
6:55あたりからです。
これを見ると分かるように単関節筋だけのモデルでは床を押すべき方向性が定まらず模型の先端がすべります。
一方で三対六筋がそろうと床とコンタクトする方向性が定まって先端がすべらずにとどまることができます。
ここで大事なのは模型はゴムを筋肉に見立てていて、どのゴムをどのくらい収縮させるかといった神経系の制御を一切受けていないことです。
もちろん素材としてのゴムのテンションがあるのでゆるゆるではだめなことは一目瞭然ですが、ある一定のテンションで張ってさえいれば、三対六筋の構造そのものがこの模型をテーブルの上にとどまって立たせていると言えます。
ハリ弟子はこういう筋肉の使い方もあるのではないかと考えています。
伝統的な運動学では目的の動きに応じてそれに必要な筋肉を選り分けて、そこを集中的にきたえれば良いと考えがちです。
でもゴムの模型を見ていると、全身の筋肉をある程度のテンションで張っておくことで必要な動きを生み出す仕組みが体にはある、とも考えられるのです。
この場合の筋肉の役割は筋肉それ自体も含めて筋肉とつながっている膜組織のテンションを作ることになります。
昨日は手首または足首の動きの方向は三対六筋の各筋肉の活動バランスで決まることをご紹介しました。
ただしこれはフルパワーで活動した場合という条件付きでした。
フルパワーでのみ動きの方向と筋肉の相関がきれいに出ました。
でもF1のツインレバーステアリングでは上腕筋だけ使えばいいようにセットしたにも関わらず、実測では全部の筋が少しずつまんべんなく働いていました。
アレクサンダー・テクニークを理解する鍵の1つがこのあたりにあるような気がします。
アレクサンダー・テクニークでは頭の押し下げが発生しないような体の使い方を学んでいきます。
どこか1か所で全身の筋肉のテンションに影響を及ぼそうとしたら、一番端っこの部分が外側に向かうような動きをコントロールすれば良いのは想像に難くありません。
人間の場合、両手両足の指先または頭です。
指先もリーディング・エッジという観点で重要な役割を持つことがありますが、ここでは、脊椎という軸骨格と直結している点でやはり頭ということになるのでしょう。
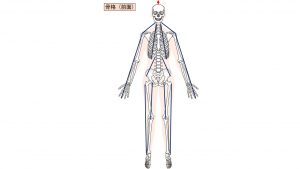
頭が外側(脊椎から離れる方向)へ向かっていくとこんなふうに全身の筋肉のテンションが適度に張るイメージです。
少しの力で全身が呼応して無駄なく動きを伝達してくれるので効率がいいと考えられます。
逆に頭が押し下げられると全身の筋肉のテンションが落ちてたわみます。
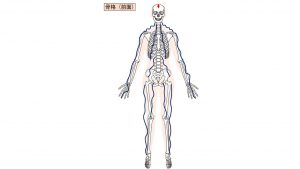
たわんだところのゆるいテンションを補うためにどこかが無理して過度に収縮して引っ張る必要が出てきます。
なので疲れやすいし効率性の観点から劣ると考えられます。
図で示したのは実際の筋肉の配置ではなくあくまでも理念的にこのように考えたらどうかというイメージです。
考え方が伝われば良いのですが、、
次回に続きます。
2016年、東京都練馬区の江古田にて音楽家専門の鍼灸治療院を始める。
2021年、東京都品川区の鍼灸院「はりきゅうルーム カポス」に移籍。音楽家専門の鍼灸を開拓し続ける。
はり師|きゅう師|アレクサンダー・テクニーク教師
